
Line Tracer Robot (LTR) atau disebut robot penjejak garis adalah sebuah robot yang dapat berjalan mengikuti garis. Ada dua kategori dalam LTR, yaitu LTR tanpa diprogram dan LTR yang dapat diprogram.
Garis yang digunakan memiliki lebar tertentu (1.5 cm - 5 cm) dengan warna garis mencolok dengan warna dasar arena, misal warna garis hitam dan warna dasar arena putih.
Untuk LTR tanpa diprogram, dapat menggunakan komponen dua buah sensor, komparator tegangan analog dan pengendali motor DC (DC motor driver).
Rangkaian LTR tanpa diprogram seperti ditunjukkan pada gambar berikut :
Garis yang digunakan memiliki lebar tertentu (1.5 cm - 5 cm) dengan warna garis mencolok dengan warna dasar arena, misal warna garis hitam dan warna dasar arena putih.
Untuk LTR tanpa diprogram, dapat menggunakan komponen dua buah sensor, komparator tegangan analog dan pengendali motor DC (DC motor driver).
Rangkaian LTR tanpa diprogram seperti ditunjukkan pada gambar berikut :

Sensor Garis digunakan untuk mendeteksi perbedaan warna garis dengan warna dasar arena. Prinsip yang digunakan adalah mendeteksi banyak atau sedikitya pantulan cahaya yang diterima oleh sensor.
Sebagai sumber cahaya (Transmitter) dapat menggunakan LED (Light Emitting Diode) yang memiliki pancaran cahaya yang terang -dapat menggunakan jenis LED Superbright atau Ultrabright. Dari beberapa percobaan, LED warna merah dapat menghasilkan pantulan cahaya yang lebih baik.
Sedangkan yang digunakan sebagai penerima pantulan cahaya (Receiver) dapat menggunakan komponen fotodioda. Jika menginginkan hasil penerimaan yang paling baik, dapat menggunakan komponen fototransistor, tetapi darisisi harga komponen tersebut lebih mahal dari fotodioda.
Rangkaian sensor garis ditunjukkan pada gambar berikut :

R1 bernilai 560 ohm agar arus yang mengalir pada LED sebesar 10 mA. Pada bagian penerima, R2 bernilai 10 kilo-ohm agar saat fotodioda menerima banyak pantulan cahaya dapat menghasilkan tegangan keluaran mendekati 0 volt, sedangkan saat fotodioda tidak menerima banyak pantulan cahaya dapat menghasilkan tegangan keluaran mendekati 5 volt.
Komparator
Komparator merupakan salah satu contoh rangkaian elektronika yang menggunakan OpAmp yang berfungsi untuk membandingkan dua buah tegangan masukan. Pada perakitan elektronik robot, rangkaian ini dapat digunakan sebagai pembanding nilai keluaran dari sensor.
Komparator dapat menggunakan komponen LM339. Rangkaian komparator yang digunakan seperti ditunjukkan pada gambar berikut :

Hasil setiap pembacaan data sensor akan dibandingkan oleh dua komparator (inverting [U1B] dan non-inverting [U1A]), sehingga hasil keluaran komparator akan berkebalikan (0 volt atau 5 volt). Hal ini bertujuan untuk memberikan isyarat ke pengendali motor agar dapat menggerakkan motor ke arah maju atau mundur.
Karena keluaran komparator hanya menghasilkan arus yang kecil, maka diperlukan pull-up resistor sebagai penguat arus. Resistor ini terpasang R4 dan R6.
H-Bridge Motor Driver
H-Bridge adalah salah satu contoh rangkaian motor driver. Susunan dasar dari rangkaian tersebut adalah beberapa transistor yang terangkai menyerupai huruf “H”. Oleh karena itu, rangkaian tersebut dinamakan H-Bridge. Rangkaian H-bridge ditunjukkan pada gambar berikut :



Komparator
Komparator merupakan salah satu contoh rangkaian elektronika yang menggunakan OpAmp yang berfungsi untuk membandingkan dua buah tegangan masukan. Pada perakitan elektronik robot, rangkaian ini dapat digunakan sebagai pembanding nilai keluaran dari sensor.
Komparator dapat menggunakan komponen LM339. Rangkaian komparator yang digunakan seperti ditunjukkan pada gambar berikut :

Karena keluaran komparator hanya menghasilkan arus yang kecil, maka diperlukan pull-up resistor sebagai penguat arus. Resistor ini terpasang R4 dan R6.
Pengendali Motor
Pengendali motor (motor driver) adalah rangkaian komponen yang dapat mengatur kinerja putaran motor. Dengan menggunakan motor driver, pengendalian motor meliputi men-start, men-stop dan memilih arah perputaran. Selain itu dapat juga mengatur kecepatan putar motor dan mencegah terjadinya kelebihan beban arus (overload) pada motor. Penggunaan motor driver disesuaikan dengan jenis dan besar arus dari motor yang akan dikendalikan.
H-Bridge Motor Driver
H-Bridge adalah salah satu contoh rangkaian motor driver. Susunan dasar dari rangkaian tersebut adalah beberapa transistor yang terangkai menyerupai huruf “H”. Oleh karena itu, rangkaian tersebut dinamakan H-Bridge. Rangkaian H-bridge ditunjukkan pada gambar berikut :

Gambar di atas, motor DC akan berputar jika salah satu transistor NPN (Q3 atau Q4) dan salah satu transistor PNP (Q1 atau Q2) aktif bersamaan. Untuk membuat hal tersebut, maka perlu diaktifkannya salah satu transistor Q5 atau Q6, yaitu dengan memberikan tegangan masukan pada kaki basis (input1 atau input2).
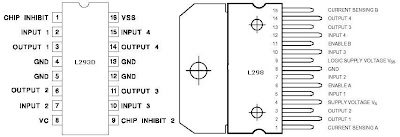
Saat ini rangkaian H-Bridge motor driver telah dikemas dalam bentuk IC, seperti IC L293D dan IC L298. Masing-masing IC tersebut memiliki kemampuan menghantarkan sejumlah arus yang berbeda.
Saat ini rangkaian H-Bridge motor driver telah dikemas dalam bentuk IC, seperti IC L293D dan IC L298. Masing-masing IC tersebut memiliki kemampuan menghantarkan sejumlah arus yang berbeda.

Untuk rangkaian yang menggunakan driver motor L293D, ditunjukkan pada gambar berikut :

Rangkaian keseluruhan dari Robot Line Tracer tanpa diprogram adalah sebagai berikut :

Masir mas.... ehehehehe.. sip...
BalasHapus